KITTI数据集raw_data标定文件说明
本文共 4941 字,大约阅读时间需要 16 分钟。
官方文档:
calib_cam_to_cam.txt为相机i到0号相机的标定参数。
calib_time: 09-Jan-2012 13:57:47corner_dist: 9.950000e-02S_00: 1.392000e+03 5.120000e+02K_00: 9.842439e+02 0.000000e+00 6.900000e+02 0.000000e+00 9.808141e+02 2.331966e+02 0.000000e+00 0.000000e+00 1.000000e+00D_00: -3.728755e-01 2.037299e-01 2.219027e-03 1.383707e-03 -7.233722e-02R_00: 1.000000e+00 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00T_00: 2.573699e-16 -1.059758e-16 1.614870e-16S_rect_00: 1.242000e+03 3.750000e+02R_rect_00: 9.999239e-01 9.837760e-03 -7.445048e-03 -9.869795e-03 9.999421e-01 -4.278459e-03 7.402527e-03 4.351614e-03 9.999631e-01P_rect_00: 7.215377e+02 0.000000e+00 6.095593e+02 0.000000e+00 0.000000e+00 7.215377e+02 1.728540e+02 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00 0.000000e+00S_01: 1.392000e+03 5.120000e+02K_01: 9.895267e+02 0.000000e+00 7.020000e+02 0.000000e+00 9.878386e+02 2.455590e+02 0.000000e+00 0.000000e+00 1.000000e+00D_01: -3.644661e-01 1.790019e-01 1.148107e-03 -6.298563e-04 -5.314062e-02R_01: 9.993513e-01 1.860866e-02 -3.083487e-02 -1.887662e-02 9.997863e-01 -8.421873e-03 3.067156e-02 8.998467e-03 9.994890e-01T_01: -5.370000e-01 4.822061e-03 -1.252488e-02S_rect_01: 1.242000e+03 3.750000e+02R_rect_01: 9.996878e-01 -8.976826e-03 2.331651e-02 8.876121e-03 9.999508e-01 4.418952e-03 -2.335503e-02 -4.210612e-03 9.997184e-01P_rect_01: 7.215377e+02 0.000000e+00 6.095593e+02 -3.875744e+02 0.000000e+00 7.215377e+02 1.728540e+02 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00 0.000000e+00S_02: 1.392000e+03 5.120000e+02K_02: 9.597910e+02 0.000000e+00 6.960217e+02 0.000000e+00 9.569251e+02 2.241806e+02 0.000000e+00 0.000000e+00 1.000000e+00D_02: -3.691481e-01 1.968681e-01 1.353473e-03 5.677587e-04 -6.770705e-02R_02: 9.999758e-01 -5.267463e-03 -4.552439e-03 5.251945e-03 9.999804e-01 -3.413835e-03 4.570332e-03 3.389843e-03 9.999838e-01T_02: 5.956621e-02 2.900141e-04 2.577209e-03S_rect_02: 1.242000e+03 3.750000e+02R_rect_02: 9.998817e-01 1.511453e-02 -2.841595e-03 -1.511724e-02 9.998853e-01 -9.338510e-04 2.827154e-03 9.766976e-04 9.999955e-01P_rect_02: 7.215377e+02 0.000000e+00 6.095593e+02 4.485728e+01 0.000000e+00 7.215377e+02 1.728540e+02 2.163791e-01 0.000000e+00 0.000000e+00 1.000000e+00 2.745884e-03S_03: 1.392000e+03 5.120000e+02K_03: 9.037596e+02 0.000000e+00 6.957519e+02 0.000000e+00 9.019653e+02 2.242509e+02 0.000000e+00 0.000000e+00 1.000000e+00D_03: -3.639558e-01 1.788651e-01 6.029694e-04 -3.922424e-04 -5.382460e-02R_03: 9.995599e-01 1.699522e-02 -2.431313e-02 -1.704422e-02 9.998531e-01 -1.809756e-03 2.427880e-02 2.223358e-03 9.997028e-01T_03: -4.731050e-01 5.551470e-03 -5.250882e-03S_rect_03: 1.242000e+03 3.750000e+02R_rect_03: 9.998321e-01 -7.193136e-03 1.685599e-02 7.232804e-03 9.999712e-01 -2.293585e-03 -1.683901e-02 2.415116e-03 9.998553e-01P_rect_03: 7.215377e+02 0.000000e+00 6.095593e+02 -3.395242e+02 0.000000e+00 7.215377e+02 1.728540e+02 2.199936e+00 0.000000e+00 0.000000e+00 1.000000e+00 2.729905e-03
- S_i: 原始图像尺寸,宽度*高度;
- K_i: 第i号相机的内参;
- D_i:畸变系数;
- R_i: 从0号相机到i号相机的旋转矩阵;
- T_i: 从0号相机到i号相机的平移向量;
- S_rect_i: 校正后的图像尺寸;
- R_rect_i:作用同R_i,校正后的旋转矩阵;
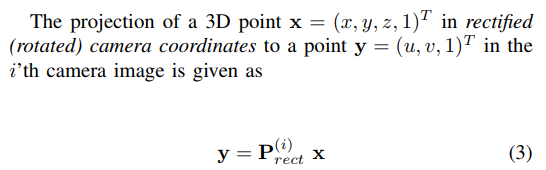
- P_rect_i:校正后的投影矩阵,维度为3*4。

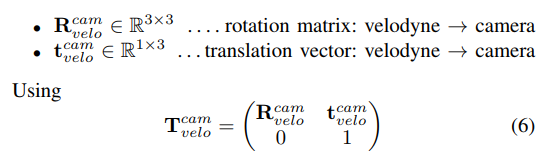
calib_velo_to_cam.txt为激光雷达到0号相机之间的标定参数。
calib_time: 15-Mar-2012 11:37:16R: 7.533745e-03 -9.999714e-01 -6.166020e-04 1.480249e-02 7.280733e-04 -9.998902e-01 9.998621e-01 7.523790e-03 1.480755e-02T: -4.069766e-03 -7.631618e-02 -2.717806e-01delta_f: 0.000000e+00 0.000000e+00delta_c: 0.000000e+00 0.000000e+00

车体信息
存在oxts文件夹中,每张图片对应一个txt文件。每个文件包含30个值,分别是:
- lat: latitude of the oxts-unit (deg)
- lon: longitude of the oxts-unit (deg)
- alt: altitude of the oxts-unit (m)
- roll: roll angle (rad), 0 = level, positive = left side up (-pi…pi)
- pitch: pitch angle (rad), 0 = level, positive = front down (-pi/2…pi/2)
- yaw: heading (rad), 0 = east, positive = counter clockwise (-pi…pi)
- vn: velocity towards north (m/s)
- ve: velocity towards east (m/s)
- vf: forward velocity, i.e. parallel to earth-surface (m/s)
- vl: leftward velocity, i.e. parallel to earth-surface (m/s)
- vu: upward velocity, i.e. perpendicular to earth-surface (m/s)
- ax: acceleration in x, i.e. in direction of vehicle front (m/s^2)
- ay: acceleration in y, i.e. in direction of vehicle left (m/s^2)
- az: acceleration in z, i.e. in direction of vehicle top (m/s^2)
- af: forward acceleration (m/s^2)
- al: leftward acceleration (m/s^2)
- au: upward acceleration (m/s^2)
- wx: angular rate around x (rad/s)
- wy: angular rate around y (rad/s)
- wz: angular rate around z (rad/s)
- wf: angular rate around forward axis (rad/s)
- wl: angular rate around leftward axis (rad/s)
- wu: angular rate around upward axis (rad/s)
- posacc: velocity accuracy (north/east in m)
- velacc: velocity accuracy (north/east in m/s)
- navstat: navigation status
- numsats: number of satellites tracked by primary GPS receiver
- posmode: position mode of primary GPS receiver
- velmode: velocity mode of primary GPS receiver
- orimode: orientation mode of primary GPS receiver
转载地址:http://ymqof.baihongyu.com/
你可能感兴趣的文章
剑指offer 66. 和为S的两个数字
查看>>
leetcode 热题 Hot 100-5. 二叉树的最大深度
查看>>
leetcode 热题 Hot 100-2. 有效的括号
查看>>
leetcode 热题 Hot 100-3. 合并两个有序链表
查看>>
leetcode 热题 Hot 100-4. 对称二叉树
查看>>
Leetcode C++《热题 Hot 100-12》226.翻转二叉树
查看>>
Leetcode C++《热题 Hot 100-13》234.回文链表
查看>>
Leetcode C++《热题 Hot 100-14》283.移动零
查看>>
Leetcode C++《热题 Hot 100-15》437.路径总和III
查看>>
Leetcode C++《热题 Hot 100-16》448.找到所有数组中消失的数字
查看>>
Leetcode C++《热题 Hot 100-17》461.汉明距离
查看>>
Leetcode C++《热题 Hot 100-18》538.把二叉搜索树转换为累加树
查看>>
Leetcode C++《热题 Hot 100-19》543.二叉树的直径
查看>>
Leetcode C++《热题 Hot 100-20》617.合并二叉树
查看>>
Leetcode C++《热题 Hot 100-21》581.最短无序连续子数组
查看>>
Leetcode C++《热题 Hot 100-22》2.两数相加
查看>>
Leetcode C++《热题 Hot 100-23》3.无重复字符的最长子串
查看>>
Leetcode C++《热题 Hot 100-24》5.最长回文子串
查看>>
Leetcode C++《热题 Hot 100-25》11.盛最多水的容器
查看>>
Leetcode C++《热题 Hot 100-26》15.三数之和
查看>>